一、功能描述
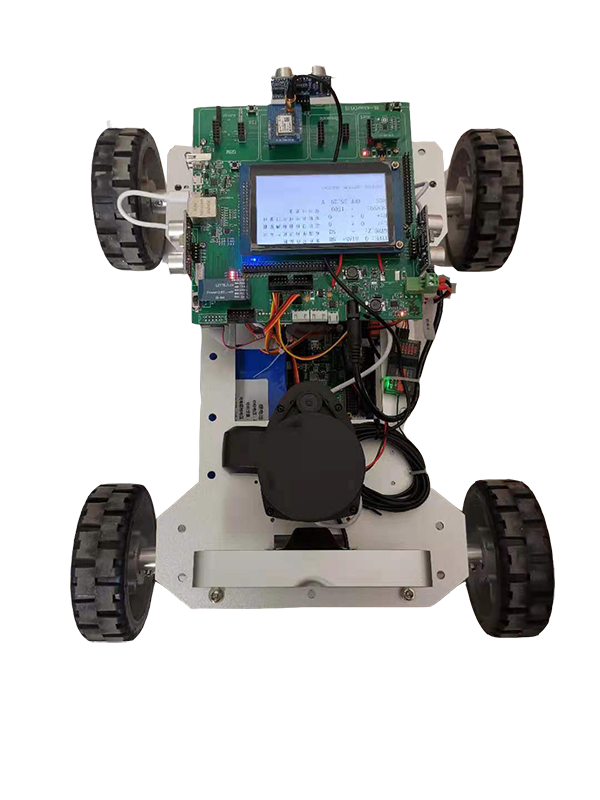
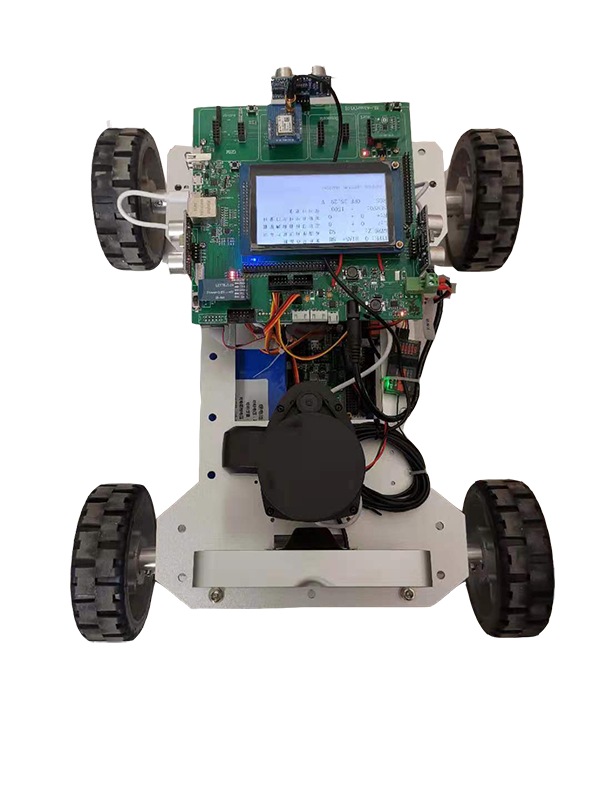
EL-AIcar-I自动驾驶算法竞赛平台是真正的智能车或是轮式机器人,它在传统智能车的基础上通过搭载功能强大的导航计算机,由导航计算机连接深度摄像机来实现人的双眼功能,由导航计算机连接的激光雷达对场景扫描并通过软件建模来判定障碍物位置从而实现自主导航。
导航计算机是以ubuntu为操作系统,并在其上的运行机器人的ROS系统,该ROS系统可挂接机器人建模软件来仿真设计各类机器人,也可挂接仿真软件来验证相关识别算法或控制算法从而较为直观地看到机器人模拟的运行状态,为真实机器人的设计与控制提供完备的理论基础。同时ROS系统还可以与OPENCV、TensorFlow等视频图像识别软件进行数据交互,将其AI的视觉功能发挥到极致。
车体控制单元部分采用基于ARM Cortex-M4 内核的STM32F407处理器,主要完成电源管理、电机控制及测速、红外或超生波避障、IMU姿态解算及GPS定位功能。车体控制单元通过相应接口与做AI控制的导航计算机相连,实现导航所用数据上传及接收导航计算机控制指令。同时引出407所有的GPIO引脚到排针,方便用户DIY。
二、系统结构
无人驾驶竞赛平台可分为室内竞赛平台与室外竞赛平台,室内平台采用英伟达Jetson nano带GPU的4核A57处理器,可自行加装语音控制单元进行控制。采用真实的四轮电动代步车平台,搭载高性能计算机、高速激光雷达与GPS单元。
|